张正友相机标定(全流程,含畸变,matlab源代码解析)
”张正友 相机标定法“ 的搜索结果
张正友相机标定法 用于标定摄像头,可以矫正畸变,摄像头位置要固定
比如点的位置偏差几个像素,甚至出现特征点对误匹配的现象,如果只使用4个点对来计算单应矩阵,那会出现...包括利用最优化算法的标定方法,利用摄像机变换矩阵的标定方法、进一步考虑畸变补偿的两步法、张正友标定法。
2.4.1.2 张正友相机标定法
标签: 自动驾驶
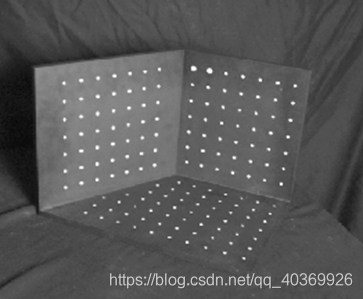
传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。...
张正友相机标定算法详细讲解。此外还包含了自动驾驶全栈的学习资料。

张正友标定法利用如下图所示的棋盘格标定板,在得到一张标定板的图像之后,可以利用相应的图像检测算法得到每一个角点的像素坐标 (u,v)。张正友标定法将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0,...
张正友相机标定法是一种通过测量相机拍摄棋盘格上的特征点来计算相机内参和畸变参数的方法。这种标定方法简单易行,能够帮助恢复真实世界中的三维信息,提高图像处理和分析的准确性。在计算机视觉和机器视觉领域中...
求解摄像机的内、外参数。
本节我们将学习相机标定和对极几何两部分的...在相机标定部分,我们将学习直接线性变换,张正友标定法和PnP这三种方法。在对极几何部分,我们将了解极平面、基线、极点和极线等概念,以及相机相对位姿估计和对极约束。
里面有两个文件MATLAB相机标定工具箱;张正友相机标定法代码。
张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机...
R是3×3的正交单位矩阵(即旋转矩阵),t为平移向量,R、t与摄像机无关,所以称这两个参数为摄像机的外参数(extrinsicparameter),可以理解为两个坐标原点之间的距离,因其受x,y,z三个方向上的分量共同控制,所以其...
张正友相机标定法原理与实现
标签: 计算机视觉
相机标定指建立相机图像像素位置与场景点位置之间的关系,根据相机成像模型,由特征点在图像中坐标与世界坐标的对应关系,求解相机模型的参数。相机需要标定的模型参数包括内部参数和外部参数。针孔相机成像原理其实...
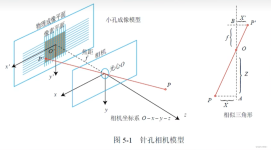
我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图,彩色图是RGB三通道,每个...
校准准备相机在不同位置和方向拍摄的10多张棋盘图像。 确保它们的格式为“ JPG”或“ jpg”或“ png”。 (最好使用相同的格式,因为我不知道它是否可以工作。) 将它们放在名为chess的文件夹中,该文件夹应该与...
毕业设计做了相机标定相关的工作,想着把理论和实现方法总结一下发出来,算是个记录...本文使用的方法是张正友的相机标定法 Z. Zhang, “A flexible new technique for camera calibration,” in IEEE Transactions on
基于OpenCV实现张正友相机标定(完整程序+棋盘图),代码可直接打开运行,附有棋盘图。如有问题可直接联系博主。




针对鱼眼镜头所存在的畸变问题,提出了基于张正友标定法的一种改进的两步标定法。该方法把作为解 析解求解出来的初始参数用非线性最小二乘法进一步完善,得到了内外参数,提高了初始数值的鲁棒性,并 把 切 向 畸 变...
张正友相机棋盘标定法的matlab的实现代码,不包括图像棋盘角点检测部分

张正友相机标定棋盘格pdf文件 直接下载 打印可用 PDF文件
张正友相机标定源代码.zip
标签: 张正友 标定
张正友相机标定源代码,及标定图片,合作愉快,谢谢下载。。。。。

推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地